Hello, dear reader! I think you have many assumptions about the performance and usage of data structures in C++. This blog post is me, destroying your world.
To fully enjoy this article, I recommend you, if you need it, quick refreshers about linked lists, double ended queues, hash tables, binary trees, b-trees, and heaps.
Without further ado, let the destruction begin!
Inserting and getting data
Look at the following program:
std::vector<std::uint64_t> v;
for(std::uint64_t i = 0; i < 10'000'000; ++i)
{
v.push_back(i);
}
You’re probably thinking “This is so inefficient!”
Do you think that this program will run faster if:
- We use std::deque instead of std::vector?
- std::list instead of std::vector?
- std::set?
- std::unordered_set?
Let’s bench it!
On a Xeon E5-2630 v3, running Windows 10, and using VS 2019:
std::vector: 163,277 usstd::deque: 695,575 us – 4X+ slowerstd::list: 1,123,685 us – 9X+ slowerstd::set: 3,043,661 us – 18X+ slowerstd::unordered_set: 4,979,332 us – 30X+ slower
There is one way, though, to make the program run much faster:
std::vector<std::uint64_t> v;
v.reserve(10'000'000);
for(std::uint64_t i = 0; i < 10'000'000; ++i)
{
v.push_back(i);
}
This implementation runs in 53,185 us (3X+ faster). If you’re curious, reserve for std::unordered_set brings it down to 2,545,083 us, making std::unordered_set faster than std::set.
In C++ there is only one God, and its name is vector.
Why? Why? Why!!!
The common allocation strategy for std::vector is to reallocate always the double of existing usage, quickly bringing down the number of allocation (with an asymptote in O(log n)). For 10M entries, that means we probably do less than 25 allocations (2^24 = 16,77,216).
Even if we must copy everything over at each reallocation, the data is continuous in memory, making copies super-fast (notwithstanding inserting a new entry, super-fast as well). If we were using push_front, vector would do poorly because we would have to move at every insert.
std::deque will have 10M/size of the chunk allocations. std::list probably at least one allocation per entry, same for set, and std::unordered_set. std::unordered_set has the double penalty of needing to resize the array + allocating the node. If we reserve the std::unordered_set, we just manage to beat std::set.
On top of that, std::vector only need to store the entry, deque needs to create the chain between each chunk, list between each entry, same for set. std::unordered_set needs to compute the hash for each entry, create the node, and link to that node.
You can mitigate these problems with an ad-hoc allocator, but you’ll never surpass the raw power of std::vector.
If you are curious about benchmarking STL containers, you can see a more this in-depth article
The ideal case
It’s good to keep in mind what your computer like (by computer I mean hardware + operating system):
- Continuous memory area to benefit from cache, and then page locality
- If possible, hitting the same memory area again and again (continuous memory helps)
- As few indirections as possible
- As few branches as possible
Size of the object
Should you store the object itself in the collection, or a pointer to the object? In our example, we used a 64-bit integer (8 bytes), and as the size of the object grows, performance problem can arise. While it may sound beneficial to chose a container that doesn’t move objects as you grow (for example a deque or a linked list), you can also consider to store a pointer to an object (with std::unique_ptr).
What is the most efficient will depend on your exact use case.
For insertion
To insert data in a memory structure, the code sample you saw at the beginning is extremely efficient. You append to an existing memory area, where you just wrote. The page is hot in memory, the address is in the TLB, and the cache can do its work optimally.
You want, as much as possible, to go back to this case. This is why it’s generally better to insert data unsorted and sort it after than do a sorted insertion.
For lookups
This is the ideal entry lookup. You may not like it, but this is what peak performance looks like:
std::vector<std::uint64_t> v;
// stuff
// assuming size_t idx is where your entry is
auto x = v[idx];
One indirection to a contiguous memory area. And if you recently looked up an entry at a close index, it’s in the cache. As much as possible, you want to find yourself in that case.
The problem is, very often, you need to search for your entry and thus don’t know the direct index. You probably know that linear search is faster for entries with a small number of elements (as explained in this blog post for example).
For deletion
If you want to remove elements a lot, vector isn’t your friend, as, like when inserting in front, this means moving elements along. You can mitigate that by putting a tombstone instead of entries when you want to remove them, but if you have a lot of insertion and deletion, this is a case where vector is not a good fit.
For destruction
Should you care about how fast destruction your container is? More often than you think.
For example, to properly destroy a linked list, you have to inspect every node, and free it. So, on top of calling the destructor, you have to make O(n) deallocations. On the other side, a vector only requires de-allocating a single continuous memory area and is thus extremely fast (you still need to call the destructor of every item).
Destruction speed is essential if your containers are relatively short-lived, for example, created for the duration of a function. You can mitigate that by extending their lifetimes (re-using the same container), or, by using a different container altogether.
If destruction takes up significant time, you may want to optimize the destruction of the elements in the collection. If they have a nontrivial destructor, you may want to see if using a memory arena could be beneficial.
In short
Before doing anything, ask yourself “Could I not just use an unsorted vector for this?”
Now we got that out of the way, let’s dive into the non-trivial stuff, because, as you can guess, std::vector isn’t always the solution.
Bettering vector
The fastest allocation you can do is use the stack, as it costs exactly one instruction, moving the stack pointer. That’s why, when you know how many entries your container will have, you should use std::array instead of std::vector (or you can use a C array if you’re the kind of person who listens to old school hip-hop on a cassette player, no judgment).
This approach is less attractive as soon as the size your vector exceeds a significant percentage of your stack size, or, when you expect to move the vector, which would prevent efficient move semantics.
To this, you’re going to say, “But! I don’t know how large my vector should be at compilation!”
Most of the time, you don’t. But, if you know that very frequently, your vector will not exceed a specific size, then you can use the small vector optimization.
The small vector optimization is when the object is pre-allocated for a certain number of objects and will switch to dynamic memory allocation when it exceeds that value. Boost and Folly each offer an implementation (at QuasarDB we use Boost’s).
Hash tables
The C++ hash table implementation
The hash table is probably the second most useful data structure after the array. They deliver O(1) lookup with a proper hash function. C++ comes with std::unordered_map and std::unordered_set. If lookup is in the critical path, you can greatly benefit from a hash map with a good hash function.
That being said, if the hash table is really in the performance path, then you will quickly find out that std::unordered_map, isn’t that great.
This is because the standard is written in such a way that implementations are an array of linked lists. That means that although the complexity of the lookup is O(1), you need to do several memory accesses (and indirections) to access your entry. When the hash table lookup is in your critical path, this can incur a significant slowdown.
This great talk explains how you can build a better hash table. This article shows a benchmark of existing hash tables implementations.
One crucial thing to keep in mind. Today’s efficient hash tables implementations usually store the object within the array, to save one indirection and increase cache efficiency. As the size of the object grows, it becomes more efficient to store it in a node, to make re-arranging the array faster. Measure and decide accordingly.
At QuasarDB we currently use:
- tbb::concurrent_hash_map when we need concurrent reads and writes
- robin_hood::unordered_map in other cases
- std::unordered_map in legacy code that hasn’t been updated yet
Efficiently leveraging your hash tables
Hash tables were initially not part of the C++ standards as they have a certain number of caveats. If you don’t know about them, O(1) lookup can become O(n) lookup.
On the importance of the hash function
Your hash function needs to be fast and provide great dispersion. Collisions are bad for hash maps as they force on additional comparison per collision. Thus, you want to ensure different entries have different hashes. For integral types, the hash function is trivial. For strings, Murmurhash or Farmhash are great.
However, for composed types, there’s a catch.
Let’s look at this structure
struct my_struct
{
std::string a;
std::string b;
};
Let’s say you use a good hash function such as farmhash. You build a custom hash function in such a way:
template <>
std::hash<my_struct>
{
size_t operator()(const my_struct & v) const noexcept
{
return farmhash::hash(v.a) ^ farmhash::hash(v.b);
}
};
You used XOR to maximize entropy, but there’s a problem. XOR is commutative, meaning the order of the operation doesn’t change the result. Also, if the two hashes are equal, the value will be zero, amplifying collisions.
In other words my_struct{"a", "b"} and my_struct{"b", "a"}, will yield the same hash, creating collisions, slowing down the lookup.
This is why you should properly compose hash function. You can use boost::hash_combine(), for example. At QuasarDB we have an equivalent function, with constexpr:
template <class Integer>
constexpr std::size_t hash_combine(std::size_t seed, Integer v) noexcept
{
return seed ^ ((static_cast<std::size_t>(v) + std::size_t{0x9e3779b9}) + (seed << std::size_t{6}) + (seed >> std::size_t{2}));
}
For strings and blobs we use farmhash, and custom hash functions for any other type.
Reserve!
A hash table is an array of buckets, inserting new entries, resizes this array. That’s why it’s highly advised to reserve your hash map to the maximum number of buckets you expect it to hold (assuming your hash function does it job one bucket = one entry). That way, you won’t have to pay for a reallocation as you insert new entries.
When you really need your data ordered
Ordered, or not ordered?
Ordered data is a requirement for a lot of data processing. I’m always dumbfounded by how many software engineering problems eventually come down to sorting problems.
Examples when you need data to be sorted: removing duplicates in a collection, data analysis criteria (for example, data lower/higher than…), partitioning data based on a threshold, etc.
It’s very important to figure out early on if you need the data in your container to be ordered, because ordered data will limit your choice in data structures. Again, we tend to overestimate our need for data to be ordered. It can be more efficient to sort the data when you need it to be sorted, than to keep it sorted all the time.
My advice, would be:
- Ensure that ad-hoc sorting is not best for your case
- If that doesn’t suffice, maybe a heap can be a good data structure for your use case
- For unicity problems, consider a hash table
- Damn! Looks like you really need a sorted data container
std::map, the average performer
Until C++ 11 the only “official” associative container available was std::map, which is ordered. If you need your data to be ordered, std::map or std::set do the job. But you should use them only if ordered data is sufficient to solve your problem (performance or otherwise).
These containers are implemented as binary trees and thus incur an allocation of a node at every insertion and have a very cache-unfriendly lookup.
To be fair, std::map has one solid advantage: it performs ok accross the board. It doesn’t have the caveat that std::unordered_map has. And with std::multimap, you can have entries with similar keys, which is, very useful. Since C++ 17 you can also extract nodes to attach them to another std::map, making it possible to build temporary maps and merge them.
So, should you use std::map?
Yes if:
- The code isn’t performance critical and you need a sorted container
- You don’t want to depend on third party libraries
For any other case, read on.
Sorted vectors
My favorite structure is the sorted vector. Boost has flat_map and flat_set (as well as flat_multimap and flat_multiset).
How does a sorted vector works? Instead of having the items on the nodes of a binary tree, like with a map, the items are stored in a vector, sorted according to a predefined criteria. Lookup is performed using binary search which has a O(log n) complexity.
In theory, a sorted vector is as fast as a binary tree, in practice it can be much faster, because:
- Memory is contiguous, making the structure very cache friendly.
- Destruction of the container has almost no overhead (as opposed to the map that needs to delete every node)
- You can insert n elements in a vector as they come, and then sort the vector, instead of making n sorted insertions
- You can give an insertion hint, for example, when you know you are inserting from a sorted source, this moves from O(log n) insertion to O(1)
- You can pre-allocate your sorted vector
In other words, the sorted vector can bring you back to the ideal insertion use case we described at the top.
In my experience, a sorted vector just crushes a binary tree. Most of the time…
What’s the catch?
The catch is that if you can’t insert the data (almost) ordered, and you can’t buffer the insertions, every insert will force you to move existing entries, resulting in terrible insertion performance.
But fear not, as we can do better that binary trees for that case.
B-Trees
The problem with binary trees is that one entry is linked to two other entries down the tree. That means one node per entry: one allocation at every insert, poor locality. If you use a B-Tree instead of a binary tree, each node can have several children, minimizing the overhead, and making the data structure more cache friendly.
Google’s Abseil has a great C++ 17 compliant B-Tree implementation.
At QuasarDB, we are big fans of sorted vectors and use them extensively. We currently are not using B-Tree as we haven’t been in a case that we couldn’t solve with either sorted vector or an unsorted data structure altogether.
The structures we never talk about
At the beginning of this post, we seemed to have destroyed std::list and std::deque. Don’t be fooled by this benchmark, these structures are very useful.
Showing linked lists the love they deserve
As you get more experience with programming, you may share the sentiment in this article that linked list are useless.
They are not. They are a very useful data structure, once you understand its hidden power: a linked list never invalidates iterators, except for the iterator pointing to deleted elements (obviously!).
You can thus safely use iterators as a proxy for an existing object, making, for example, linked list a great data structure for LRU caches (generally implemented as a hash map + a linked list). And believe me, as a software project grows, the probability of this project having at least one cache converges to 1.
std::list is a doubly linked list, meaning each element points to its predecessor and successor. If you only need to traverse the list in a single direction, you can use std::list.
When to use a deque?
We saw in the benchmark that vector outperforms deque for insertion at the end. And you thought deque was optimized for that case!
Not exactly. Deque, is great when you need to insert (or remove) at the end and the beginning of the container. In addition, deque does not invalidate iterators when you insert only at the beginning and the end.
Although deque gives a O(1) asymptotical performance for access, is around twice lower than std::vector as it requires two pointer dereferences instead of one for each access.
But remember, it’s very hard to beat a vector at anything. It’s the S&P 500 of C++.
Guidelines you can extrapolate from this
So what’s the take away?
- Default to std::vector, if you can know the size at compile time, use std::array
- If you really need the data to be ordered use a sorted vector or a B-Tree
- If you need fast lookup, use a hash table, but be minfdul of the hash function and of the limitations of std::unordered_map
As an added bonus, here’s the decision graph we use at QuasarDB. It’s not complete (it can’t be) as it doesn’t include the very special cases where you may want linked lists, deque, prefix trees, etc.
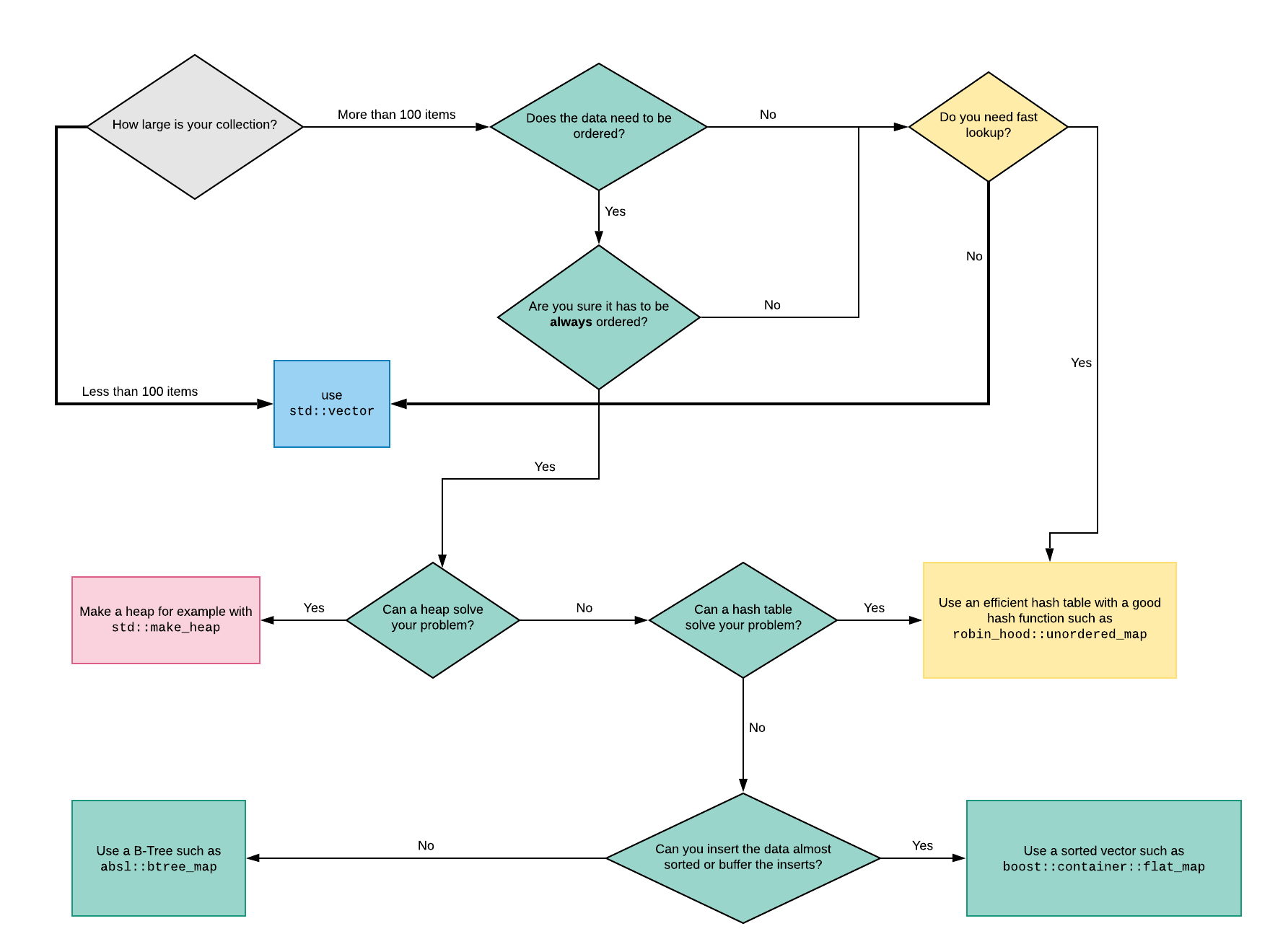
The goal is to help you go in the right direction with the right questions.
As always: conjecture, measure, deduce, decide!